Управление Arduino с телефона. Прием данных от устройства
Итак будем управлять двумя реверсивными (вращение в обе стороны) двигателями: основным и рулевым. Питать их будем от аккумулятора 3,7 В, но можно и до 12 В в принципе подавать, если согласовать питание контроллера или организовать его отдельным аккумулятором.
В силовой части используем простейший миниатюрный драйвер шагового двигателя l9110s или же можно использовать сборку на L293\8 или любой не менее мощный, который вы найдёте. В общем я всё нарисовал на картинке.
Приобрести комплектующие для проекта можно на алиэкспресс:
WiFi контроллер использован мой любимый NodeMCU 0.9 ESP8266 , но можно использовать и меньший размером WeMos D1 mini.
Аккумулятор можно зарядить через микро-USB, после чего он питает драйвер двигателей напрямую и WiFi-контроллер через повышающий преобразователь до 5 В .
Код программы:
#include
const char* ssid = "имя вашей сети вайфай";
const char* password = "пароль вашей сети";
int up = 2; //номера дискретных выходов
int down = 14;
int left = 4;
int right = 12;
// Create an instance of the server
// specify the port to listen on as an argument
WiFiServer server(80);
void setup() {
Serial.begin(9600);
delay(10);
//подготовка выходов
pinMode(up, OUTPUT);
digitalWrite(up, 0);
pinMode(down, OUTPUT);
digitalWrite(down, 0);
pinMode(left, OUTPUT);
digitalWrite(left, 0);
pinMode(right, OUTPUT);
digitalWrite(right, 0);
// Connect to WiFi network
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
While (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
//Запуск сервера
server.begin();
Serial.println("Server started");
//выводим IP адрес в монитор порта
Serial.println(WiFi.localIP());
}
void loop() {
//проверяем подключился ли клиент
WiFiClient client = server.available();
if (!client) {
return;
}
//Ожидаем пока клиент не пришлет какие-нибудь данные
Serial.println("new client");
while(!client.available()){
delay(1);
}
//Чтение первой строки запроса
String req = client.readStringUntil("\r");
Serial.println(req);
client.flush();
//обработка команды
if (req.indexOf("/gpio/up") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/down") != -1){
digitalWrite(up, 0);
digitalWrite(down, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/left") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 1);
digitalWrite(right, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else if (req.indexOf("/gpio/right") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else {
Serial.println("invalid request");
}
Client.flush();
// подготовка к ответу
String s = "HTTP/1.1 200 OK\r\nContent-Type: text/html\r\n\r\n\r\n\r\n ";
S += "
UP
";
s += "
LEFT ";
s += "RIGHT
";
s += "
DOWN";
s += "
// Send the response to the client
client.print(s);
delay(1);
Serial.println("Client disonnected");
} Программа написана в Arduino IDE. Как настроить Arduino IDE для работы с контроллером NodeMCU 0.9 ESP8266 посмотрите по ссылке. После загрузки программы в контроллер, монитором порта можно прочитать IP-адрес, который плата получит после соединения с вашим WiFi-роутером. В браузере компьютера необходимо в адресной строке прописать этот адрес и перейти на страницу, которую сгенерирует программа контроллера. Она будет выглядеть следующим образом:
DOWN
При нажатии на ссылку UP, машинка проедет вперед в течении 1сек и остановится. При нажатии на DOWN, машинка 1 секунду будет ехать назад. LEFT - двигатель поворота повернёт колёса влево и машинка проедет 1 сек влево. То же самое и вправо при нажатии на RIGHT.
Вся эта система будет работать только при настроенной WiFi-точке доступа (WiFi-роутере), но в будущем мне интересно поиграться с контроллером NodeMCU 0.9 ESP8266 , который сам будет организовывать точку доступа и выполнять функцию WEB-сервера, тоесть при заходе на его айпи из браузера, будем видеть web-страничку с элементами управления. Так же интересно организовать передачу данных с одного такого контроллера в другой посредством их автономной WiFi-сети.
Машинка на arduino и Bluetooth без редактирования кода. Мы будем использовать специализированный бесплатный софт для составления скетча. Кроме того не надо покупать шасси для нашей поделки, подойдет практически любая неисправная радиоуправляемая модель автомобиля или танка.
Предлагаю посмотреть обзорный видеоролик про блютуз-управляемую машинку и ее начинку.
Итак, давайте разберем на живом примере как сделать своими руками дистанционно управляемую по bluetooth c android планшета или смартфона машинку. Статья, как ни странно, рассчитана на начальный уровень знаний. Здесь нет руководства по редактированию кода в Arduino IDE, да и мы использовать его будем только для заливки нашего кода. А составлять алгоритм управления будем в программе под названием FLProg. Программа управления со смартфона — HmiKaskada_free. Но сначала о железе, которое нам понадобится.
Машинка на arduino и Bluetooth — аппаратная часть.
Первое что необходимо это шасси , то есть корпус с колесами и моторчиками, который и будет ездить на радость нам и окружающим. В моем случае был использован корпус от радиоуправляемой игрушки в которой выгорела силовая часть. Перспектива ремонта мне показалась унылой, да и хотелось чего то нового для своих детей. Так и родился этот проект. В корпусе стоят два двигателя которые приводят в движение колеса по бортам машинки, как у танка. Вся электронная начинка отправилась на запчасти.
Для управления электродвигателями нашего будущего творения понадобится Н-мост на микросхеме L298N Ссылка на Али, я брал у именно этот. Картинка кликабельна.
Н-мост для arduino
Может управлять двумя двигателями в диапазоне напряжений 5 — 35 вольт. Поддерживает ШИМ, то есть можно регулировать обороты двигателей. На плате есть вывод стабилизированного напряжения 5 вольт для питания ардуино.
Схема подключения проста и незатейлива:

Следующей неотъемлемой частью электронной начинки нашего проекта является bluetooth модуль HC-06 . Самый обычный модуль для ардуино, настолько популярен что в дополнительном описании не нуждается.

HC-06 bluetooth for arduino
Основным элементом и мозгом в моем случае выступает arduino nano , тут даже фото выкладывать не буду ибо все о ней знают и умеют с ней работать. Кстати подойдет любая плата ардуино, лишь бы в корпус поместилась 😀
Аккумуляторы и провода для пайки в определении спецификации не нуждаются. Выбор аккумуляторов зависит от рабочего напряжения электродвигателей.
Машинка на arduino и Bluetooth — составление скетча.
Повторюсь — никакого копания в коде тут не будет. Мы будем использовать популярную программу FLProg. Скачать ее последнюю версию можно на официальном сайте . Интерфейс проги прост и незатейлив, но имеется огромный функционал и поддержка практически всех популярных модулей. Как ей пользоваться писать не буду так как это потянет на пару статей. Скажу только что я не встречал более удобной и доступной программы для составления скетчей для arduino и ее клонов. Скрин интерфейса:

Интерфейс FLProg
На сайте полно текстовых и видео мануалов, думаю разберетесь.
Мой проект для дистанционно-управляемой машины можно скачать с яндекс-диска через сервис сокращения ссылок.
Машинка на arduino и Bluetooth — интерфейс управления на планшете android.
По многочисленным просьбам написал подробную инструкцию по разработке интерфейса управления на базе HmiKaskada android в статье . Ссылка кликабельна.
Для устройств под управлением android существует программа HmiKaskada (ссылка на ЯндексДиск) . Изначально она разрабатывалась как альтернатива дорогим промышленным HMI панелям. Но пытливые умы быстро смекнули что управлять она может чем угодно. В нашем случае машинкой. Поддерживает беспроводные интерфейсы Wi-Fi и Bluetooth, кроме того можно девайс подключить напрямую через USB.
Есть платная и бесплатная версии программы. У меня есть обе но я принципиально сделал проект в бесплатной версии что бы показать вам и в очередной раз убедиться в абсолютной работоспособности free версии. Основное отличие free от PRO версий это работа только по блютуз.
На форуме FLProg есть гигантская ветка по вопросу совместимости с КаСкадой, да и разработчик активен и общителен. Скрин панели управления выкладывать не вижу смысла — он есть в видеоролике.
Канал Science Vetal показал, как сделать машинку на управлении практически от любого андроид смартфона. При этом не будем использовать «Arduino», возьмем микроконтроллер от китайского производителя «Espressive» «esp 8266», штуковина представляет из себя «Arduino» плюс wi-fi модуль.
Все радиодетали и модули в этом китайском магазине .
Вы помните «Arduino uno», оно большое, а здесь маленькая такая штучка, в которой есть wi-fi, возможности «Arduino». К этому микроконтроллеру китайцы разработали такой shield. Он удобный: можно подключить 2 двигателя, или даже 4, при этом можно использовать 11 выводов. Так же возьмем 2 двигателя, 2 стандартных «Arduino» колеса.

Когда на «aliexpress» вводишь «Arduino» в поиск, открываются не только платы, но, сопутствующие товары. Интересные элементы, обязательно что-то интересное найдете, попробуйте.
Возьмём для питания 2 аккумулятора 18650, к ним бокс для 2-х акб, также возьмем 2 уголка, размеры около 5 дюймов, это не столь важно там плюс-минус полдюйма, дюйм. Дело в том, что конструкция может быть ваша, но представленная в ролике авторская удачна, проста.
Берем 2 уголка, при помощи винтов их необходимо соединить, чтобы сюда спокойно помещался shield. Сверлом, диаметр которого 3 мм, делаем 4 отверстия. Берем малюсенькие винты, зажимаем, соединяем эту конструкцию. Такая штуковина получается, прочности данного соединения для такой машинки, как делаем, предостаточно.
Сбоку для вала видео сверлим отверстие диаметром 8 мм, получается конструкция, но необходимо еще сделать 3 отверстия диаметром 3 мм: одно для этого выступа, для этих отверстий крепежных еще 2.
Берем, подставляем таким способом, закручиваем с помощью винтов. Один из идеальных случаев, машинка нравится, сюда нечего добавить, ее незачем переделывать. Делаем отверстия для крепления платы.
Ничего не меняем, кроме как тут, где стоит галочка, выбираем адрес к файлу, который будем заливать, затем выбираем нужный com port, нажимаем кнопочку start. Также под видео есть ссылка на программу, которую нужно установить на ваш любимый android.
Закрепил эту плату, вставляем микроконтроллер. Подключаем провода от двигателей, смотрим, если нижний будет «A-», то с этой стороны «B-» будет верхний. Настало время прикрепить колеса. Делается это легко, так как колёса двигателей – это комплект. В этом месте сверлим отверстие диаметром 4 мм, вставляем винт. Делаем такую нехитрую операцию, регулируем высоту, даже еще ниже можно, что-то получился винт, который сильно торчит. Это лишнее. Это получается, устройство дороже на копеечки, что нам, в общем-то, не нужно, как-то оно выглядит коряво.
Так посмотрим, как получается устройство, которое будет управляться андроидом на расстоянии через wifi. Конечно, получше штука. Отсек для аккумуляторов прикрепим термоклеем, машинка получается.
Вставляем аккумуляторы, необходимо быть внимательным, так как бывает часто так, что все вроде бы правильно собрал, вставил аккумуляторы, а устройство не работает. Оказывается, что эти черные пластиковые боксы. Они не дают акб встать на место.
Программа и скетч http://bbs.smartarduino.com/showthread.php?tid=2013
Приложение для управления https://play.google.com/store/apps/details?id=com.doit.carset
С модулем Wi-Fi.
На Arduino Uno WiFi предусмотрено всё для удобной работы с микроконтроллером: 14 цифровых входов/выходов (6 из них могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, разъём USB, разъём питания, разъём для внутрисхемного программирования (ICSP) и кнопка сброса микроконтроллера.
Изюминка платы - модуль WiFi ESP8266, который позволяет Arduino обмениваться информацией с другими модулями по беспроводным сетям стандартов 802.11 b/g/n.
ESP8266 позволяет прошивать плату Arduino без использование USB-шнура в режиме OTA (Firmware Over The Air - «микропрограммы по воздуху»).
Видеообзор платы
Подключение и настройка
Для начало работы с платой Arduino Uno WiFi в операционной системе Windows скачайте и установите на компьютер интегрированную среду разработки Arduino - Arduino IDE.
Что-то пошло не так?
Настройка модуля WiFi
Прошивка Arduino по WiFi
Arduino Uno WiFi имеет в своём запасе ещё один приятный бонус - возможность загружать скетчи без использование USB-шнура в режиме OTA (Firmware Over The Air). Рассмотрим подробнее как это сделать.

Для этого необходимо войти в меню: Инструменты Порт и выбирать нужный порт.
Так как мы прошиваем Arduino по WiFi, плата определиться как удалённое устройство с IP-адресом

Среда настроена, плата подключена. Можно переходить к загрузке скетча.
Arduino IDE содержит большой список готовых примеров, в которых можно подсмотреть решение какой-либо задачи. Выберем среди примеров мигание светодиодом - скетч «Blink». Прошейте плату нажав на иконку загрузки программы.
Прошейте плату нажав на иконку загрузки программы. После загрузки светодиод начнёт мигать раз в секунду. Это значит, что всё получилось.
После загрузки светодиод начнёт мигать раз в секунду. Это значит, что всё получилось.
Теперь можно переходить к примерам использования .
Примеры использования
Web-сервер
Поднимем простой web-сервер, который будет отображать страницу с текущими значениями аналоговых входов.
web-server.ino /* Пример простого web-сервера, работающего на Arduino Uno WiFi. Сервер показывает значения на аналоговых входах и обновляет информацию каждые две секунды. Обратитесь к серверу по адресу http://Пример вывода значений с аналоговых пинов
" ) ; client.print ("- "
)
;
for
(int
analogChannel =
0
;
analogChannel <
4
;
analogChannel++
)
{
int
sensorReading =
analogRead(analogChannel)
;
client.print
("
- на аналоговом входе " ) ; client.print (analogChannel) ; client.print (": " ) ; client.print (sensorReading) ; client.print ("" ) ; } client.println ("
Элементы платы

Микроконтроллер ATmega328P
Сердцем платформы Arduino Uno WiFi является 8-битный микроконтроллер семейства AVR - ATmega328P.
Микроконтроллер ATmega16U2
Микроконтроллер ATmega16U2 обеспечивает связь микроконтроллера ATmega328P с USB-портом компьютера. При подключении к ПК Arduino Uno WiFi определяется как виртуальный COM-порт. Прошивка микросхемы 16U2 использует стандартные драйвера USB-COM, поэтому установка внешних драйверов не требуется.
Пины питания
VIN: Напряжение от внешнего источника питания (не связано с 5 В от USB или другим стабилизированным напряжением). Через этот вывод можно как подавать внешнее питание, так и потреблять ток, если к устройству подключён внешний адаптер.
5V: На вывод поступает напряжение 5 В от стабилизатора платы. Данный стабилизатор обеспечивает питание микроконтроллера ATmega328. Запитывать устройство через вывод 5V не рекомендуется - в этом случае не используется стабилизатор напряжения, что может привести к выходу платы из строя.
3.3V: 3,3 В от стабилизатора платы. Максимальный ток вывода - 1 А.
GND: Выводы земли.
IOREF: Вывод предоставляет платам расширения информацию о рабочем напряжении микроконтроллера. В зависимости от напряжения, плата расширения может переключиться на соответствующий источник питания либо задействовать преобразователи уровней, что позволит ей работать как с 5 В, так и с 3,3 В устройствами.
Порты ввода/вывода
Цифровые входы/выходы:
пины 0 – 13
Логический уровень единицы - 5 В, нуля - 0 В. Максимальный ток выхода - 40 мА. К контактам подключены подтягивающие резисторы, которые по умолчанию выключены, но могут быть включены программно.
ШИМ:
пины 3 , 5 , 6 , 9 , 10 и 11
Позволяют выводить 8-битные аналоговые значения в виде ШИМ-сигнала.
АЦП:
пины A0 – A5
6 аналоговых входов, каждый из которых может представить аналоговое напряжение в виде 10-битного числа (1024 значений). Разрядность АЦП - 10 бит.
TWI/I²C:
пины SDA и SCL
Для общения с периферией по синхронному протоколу, через 2 провода. Для работы - используйте библиотеку Wire .
SPI:
пины 10(SS) , 11(MOSI) , 12(MISO) , 13(SCK) .
Через эти пины осуществляется связь по интерфейсу SPI. Для работы - используйте библиотеку SPI .
UART:
пины 0(RX) и 1(TX)
Эти выводы соединены с соответствующими выводами микроконтроллера ATmega16U2, выполняющей роль преобразователя USB-UART. Используется для коммуникации платы Arduino с компьютером или другими устройствами через класс Serial .
Светодиодная индикация
Разъём USB Type-B
Разъём USB Type-B предназначен для прошивки платформы Arduino Uno WiFi с помощью компьютера.
Разъём для внешнего питания
Разъём для подключения внешнего питания от 7 В до 12 В.
Регулятор напряжения 5 В
Когда плата подключена к внешнему источнику питания, напряжение проходит через стабилизатор MPM3610 . Выход стабилизатора соединён с пином 5V . Максимальный выходной ток составляет 1 А.
Регулятор напряжения 3,3 В
Стабилизатор MPM3810GQB-33 с выходом 3,3 вольта. Обеспечивает питание модуля WiFi ESP8266 и выведен на пин 3,3V . Максимальный выходной ток составляет 1 А.
ICSP-разъём для ATmega328P
ICSP-разъём предназначен для внутрисхемного программирования микроконтроллера ATmega328P. С использованием библиотеки SPI данные выводы могут осуществлять связь с платами расширения по интерфейсу SPI. Линии SPI выведены на 6-контактный разъём, а также продублированы на цифровых пинах 10(SS) , 11(MOSI) , 12(MISO) и 13(SCK) .
ICSP-разъём для ATmega16U2
ICSP-разъём предназначен для внутрисхемного программирования микроконтроллера ATmega16U2.
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- ID метки;
- Детские игрушки;
- Mesh-сети.
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.

Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.
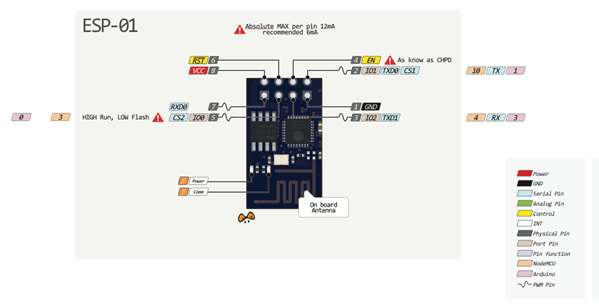

Описание контактов:
- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.
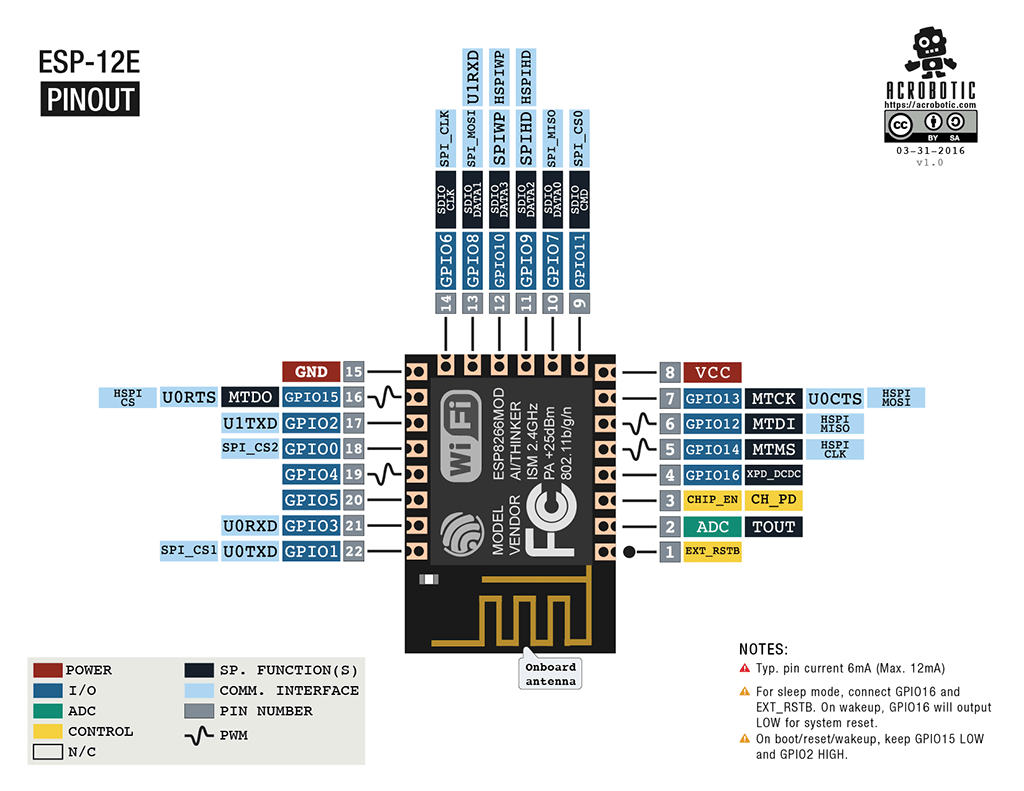
Распиновка ESP-12
Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
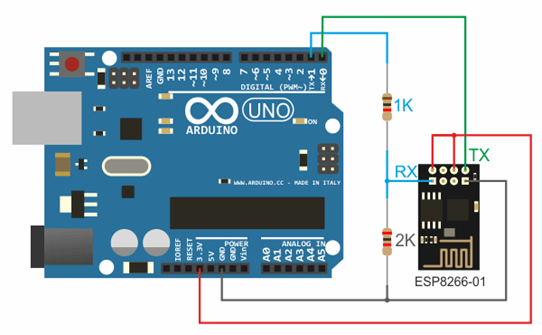
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino IDE.
- Выбрать в меню инструменты нужный порт, плату, частоту и размер flash-памяти.
- Файл - Примеры - ESP8266WiFi - WiFiWebServer.
- Записать в скетче SSID и пароль сети Wi-Fi.
- Начать компиляцию и загрузку кода.
- Дождаться окончания процесса прошивки, отсоединить GPIO0 от земли.
- Поставить скорость 115200.
- Произойдет подключение, будет записан адрес IP.
- Открыть браузер, ввести в адресной строке номер IP/gpio/1
- Посмотреть монитор порта, если к выходу GPIO2 подключен светодиод, он должен загореться.
NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.
-
 17 апреля 2015Скачать iTunes на Windows
17 апреля 2015Скачать iTunes на Windows -
 17 апреля 2015GSM-модуль Starline — чем он хорош и как установить?
17 апреля 2015GSM-модуль Starline — чем он хорош и как установить? -
 17 апреля 2015Виджеты в Dashboard Как закрыть dashboard
17 апреля 2015Виджеты в Dashboard Как закрыть dashboard
 Скрытый бан аккаунта в instagram")





